Chang-Hsin Lee (Web Building)
I am a Master’s student at the Chaotic Systems and Signal Processing Laboratory (CSSP Lab.) at National Yang Ming Chiao Tung University (NYCU), Taiwan. My research focuses on generative AI and diffusion models.
Bio:
From 2020 to 2024, studied in the Department of Electrical Engineering at Tamkang University (TKU), Taipei, Taiwan.
During this period, actively participated in multiple International Intelligent RoboSports Cup competitions and achieved commendable results.
Since 2024, a Master’s student in the Institute of Electrical and Control Engineering at National Yang Ming Chiao Tung University (NYCU)
, under the supervision of Prof. Wu.
Current research focuses on Explainable AI and Generative AI, with particular attention to their development and applications in intelligent systems.

Publications
Chang-Hsin Lee, Chih-Wei Tseng, Chien-Wen Sun, Bing-Fei Wu*
Submitted to International Conference on Machine Learning (ICML), 2026
Abs /
@inproceedings{Lee2026ICML,
author = {Chang-Hsin Lee and Chih-Wei Tseng and Chien-Wen Sun and Bing-Fei Wu},
title = {TIP-C2: A Training-Free Interpretable Module for Generation Error Detection via Principal Component Analysis and Conditional Mutual Information},
booktitle = {Submitted to International Conference on Machine Learning (ICML)},
year = {2026},
}Projects
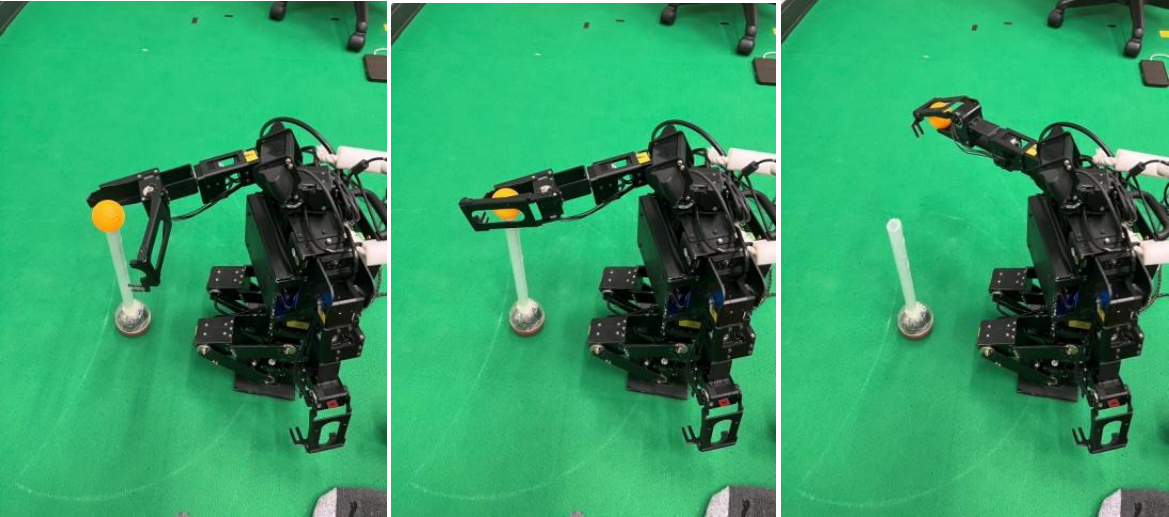
Through camera-based image acquisition and color-feature recognition, the robot perceives the positions of the ball and the basket. Area-based distance estimation and weighted force computation are then applied to determine the shooting power, enabling self-localization and successful shooting.
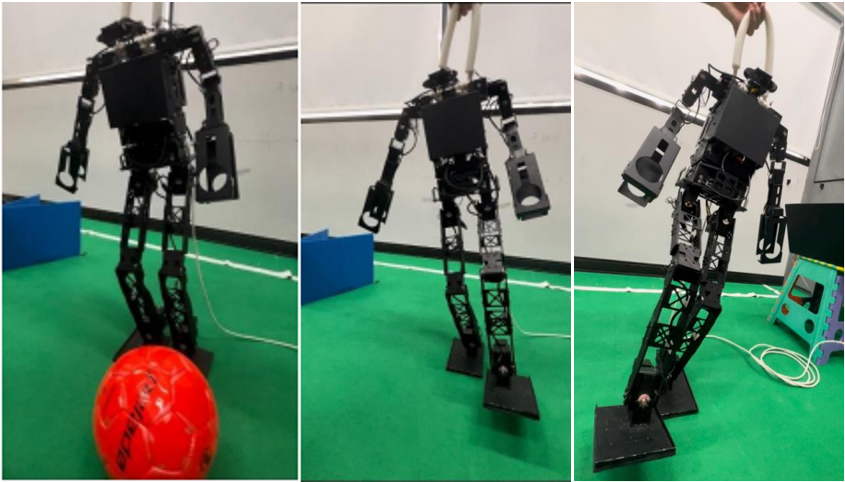
This project studies the mechanical design and operation of a first-generation FIRA large-sized humanoid robot for a penalty kick competition. Using a head-mounted camera to detect obstacles and field boundaries, the robot determines the penalty position, force, and direction, and executes the strategy accurately within a limited time.
Awards
1 / 5
Volunteer & Extracurricular Activities
1 / 0
© Copyright 2026 Chang-Hsin Lee. Powered by m-niemeyer. Design inspired by Kashyap Chitta.